刘捷–高级计算机视觉算法工程师简历
基本信息
- 姓名:刘捷
- 民族:汉
- 邮箱:liujie0068@foxmail.com
- Github:https://github.com/keeper-jie
- 住址:浙江省杭州市
- 出生年月:1998.02
- 身高:175cm
- 政治面貌:共青团员
- 毕业院校:南华大学
- 学历:硕士
- 电子简历地址:https://keeper-jie.github.io
核心优势
- 3年计算机视觉实战经验:覆盖目标检测/分割/分类/跟踪/关键点检测/旋转框检测,应用于图片、视频文件、视频流及端侧部署
- 开源贡献者:2个Ultralytics框架PR被官方采纳 (链接)
- 全栈落地能力:数据管理(数据爬虫采集 → 清洗 → CVAT/X-AnyLabeling标注 → 质检 → 训练 → 部署 → 漏检误检迭代优化)→ 算法研发(PyTorch)→ 模型优化部署(RKNN/TensorRT/OpenVINO/Triton)→ 项目交付与管理(系统集成项目管理工程师证书)
- 前沿探索:具备VLM/LLM/ASR/TTS等前沿模型实践与迁移能力
技术栈
- 算法框架:YOLOv5/v8/v10/v11/v12/26、MMDetection、PaddleDetection、Ultralytics
- 大模型:DeepSeek-R1、Qwen3-VL Unsloth/LLaMA-Factory微调及端侧部署
- 模型部署:RKNN-Toolkit2、RKLLM、TensorRT、ONNX、OpenVINO
- 算法方向:目标检测/分割/分类、关键点检测、旋转框检测、视频跟踪
- 工程工具:Docker、Linux、Git,具备模型量化(INT8)、蒸馏、剪枝经验
项目经历
1. 交通违法智能检测系统|浙江力嘉电子科技 (2022.07 - 2023.12)
- 技术栈:YOLOv8、ResNet、OBB、BoT-SORT
- 成果:
- 大货车非法加装强光灯检测:创新角度敏感损失 + 数据增强,mAP\@0.5 提升 5.3%,夜间部署日处理图片 10万+,平均推理 0.01s/图
- 非机动车闯红灯检测:CBAM+轨迹过滤,误报率 <1.5%,多服务器部署 50路视频流,精确率 98.5%+
2. 高危行为识别平台|杭州杰峰软件 (2023.12 - 2025.08)
- 任务:跌倒检测、吸烟/玩手机检测
- 技术栈:YOLOv8-Pose、STGCN、GSConv优化
- 成果:
- 视频跌倒检测:YOLOv8-Pose+STGCN实现时空轨迹分析
- 小目标优化:引入GSConv替换标准卷积,AP\@0.5 提升 8.7%
- 部署:云端T4推理 14ms/图,月调用量 50万+,RK3588端侧 28ms/图
3. Ultralytics开源贡献 (2024 - 2025)
- 修复检测框显示 & YOLOE-Seg训练报错问题 → 合入官方main分支
4. 浙江赛目科技 (2025.08 - 2025.11)
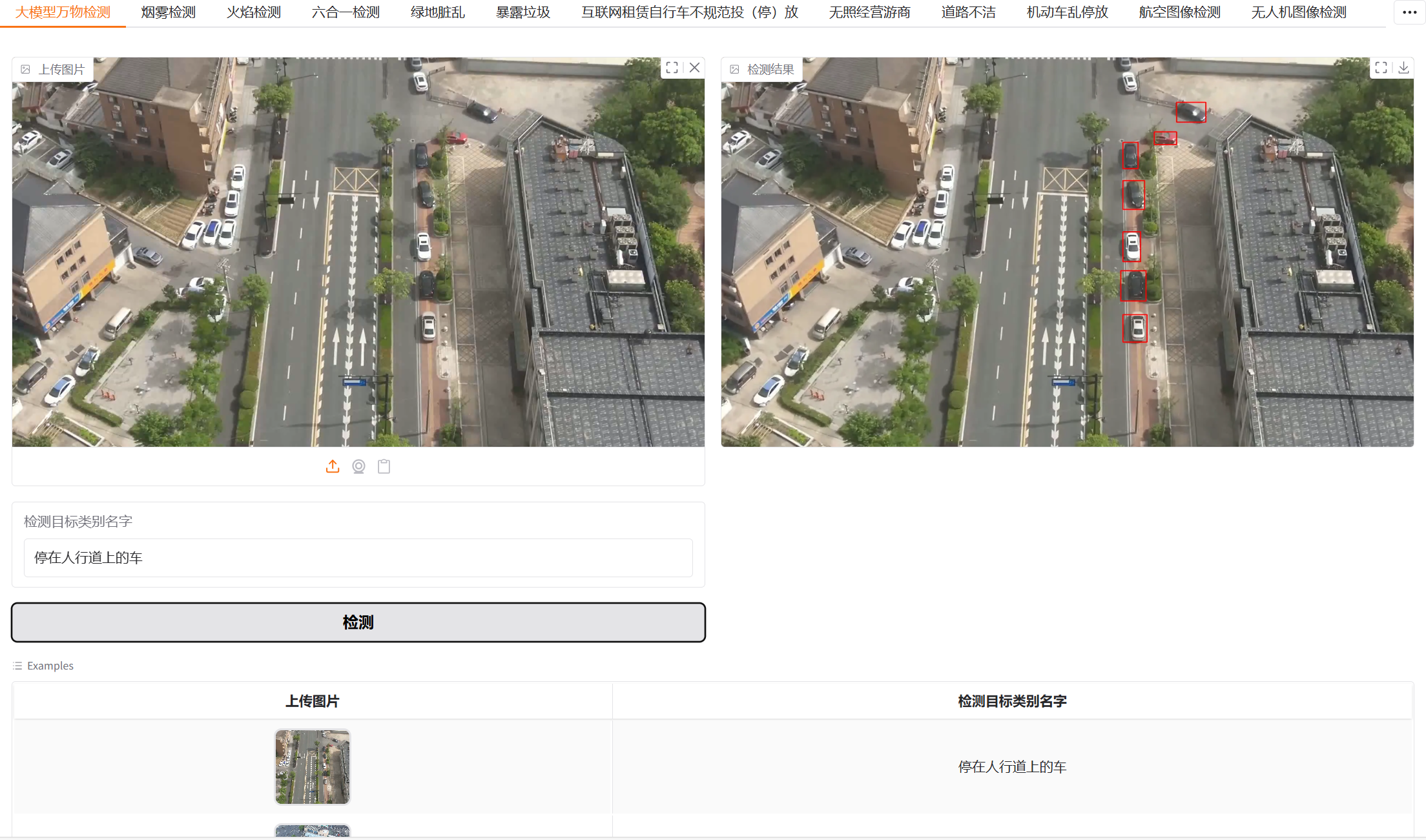
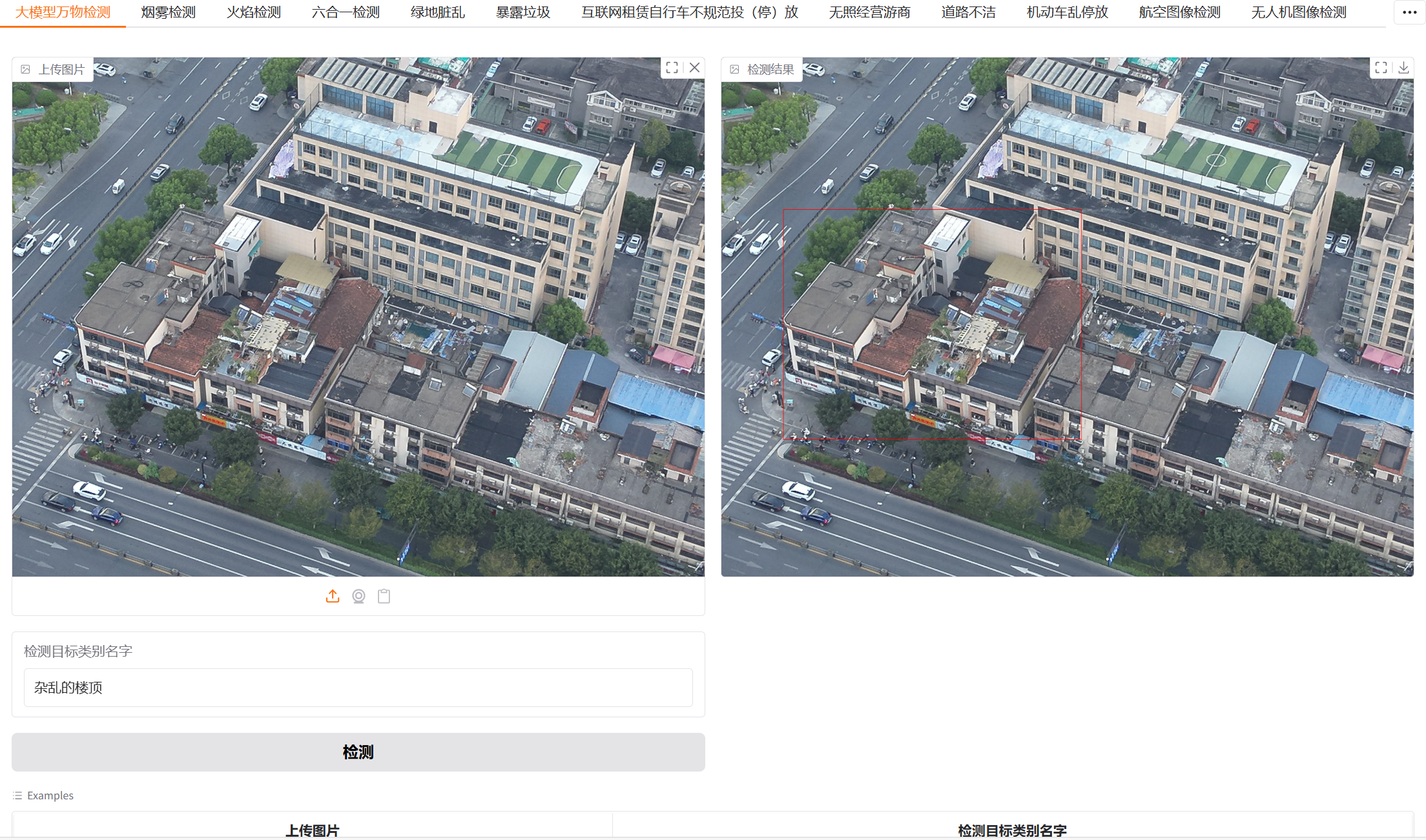
- 部署 Qwen2.5-VL-72B,探索多模态在无人机领域的零样本检测应用
- 配合仁和街道需求进行特定事件AI检测,完成17个算法预研(确定需求-》开发MVP-》安排标注任务按质按量提供算法API)
5. 杭州研趣信息技术有限公司 (2025.11 - 至今)
- 基于8000+SEM(电子显微镜)图片生成320K图文问答对资料微调Qwen3 VL 8B多模态大模型,完成数据生成-》训练-》部署-》评测工作,基于测试集相较于baseline提升了16.4%(Qwen3 VL embedding 2B计算回答的语义相似度)
- 基于半导体图片的模板匹配方法调研:尝试YOLOE,轮廓匹配,直方图匹配,SIFT,ORB,opencv模板匹配( 平方差和(SSD),标准平方差(SQDIFF_NORMED),相关(CORR),标准相关(CORR_NORMED),相关系数(CCOEFF),标准相关系数(CCOEFF_NORMED),直方图匹配(RGB颜色空间, HSV颜色空间,GRAY颜色空间) ),canny,resnet50特征提取+滑框,特征点匹配LightGlue,T-rex2,X-AnyLabeling模板匹配。在半导体测试图片上效果最好的为模板匹配cv2.TM_CCOEFF_NORMED
- 半导体量测项目图片标注-》核验-》训练-》部署,迭代优化算法效果,针对fin layer大目标修改模型架构适配
- UniEM、UniAIMS、YOLOE、SAM-EM、Qwen3-VL、Qwen3-VL-Embedding and Qwen3-VL-Reranker论文精读并云文档记录理解和反思
落地经验
- 端侧部署:RK3588完成YOLO/RetinaFace部署,量化+零拷贝,CPU利用率下降 40%
- 大模型探索:Qwen3-VL-8B图文问答POC,实践提示工程 + Unsloth/LLaMA-Factory进行多模态大模型问答任务微调
- 语音模型:Wav2Vec2/Whisper/Zipformer (ASR),MMS_TTS/MeloTTS (TTS) 量化部署
教育与证书
-
| 硕士 |
计算机技术 |
南华大学 (2019-2022) |
-
| 学士 |
计算机科学与技术 |
衡阳师范学院 (2015-2019) |
- 软件设计师(中级)、系统集成项目管理工程师(中级)、CET-6
个人特点
- 善于快速定位和解决问题,具备团队协作与沟通能力
- 持续学习,跟踪前沿趋势(端侧大模型部署、语音大模型、具身智能、AI+硬件)
- 注重文档沉淀与知识复用
文章
YOLOV8导出onnx操作及指标评测
ultralytics框架修改模型架构-新卷积
项目成果
大货车非法加装强光灯检测 + 非机动车闯红灯检测
站坐躺完整跌倒视频
向后跌倒测试
吸烟检测演示视频
往前跌倒撑在地上
往前跌倒
玩手机检测演示视频
三个小孩玩手机检测
面向摄像头向前跌倒
监控视角下大人玩手机检测
RK3588
RK3588实时目标检测-yolov10
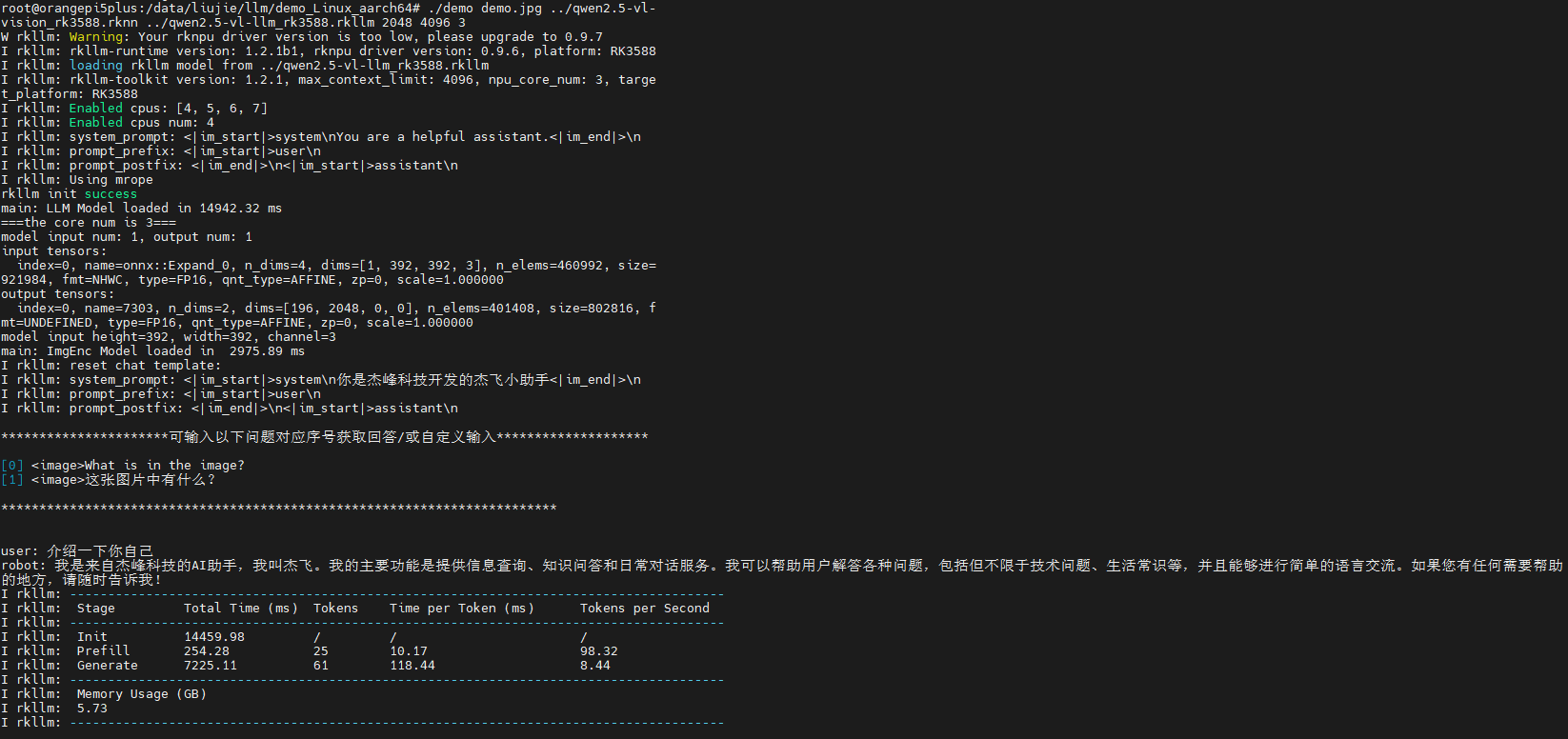
RK3588部署QwenVL-2.5 3B微调后效果
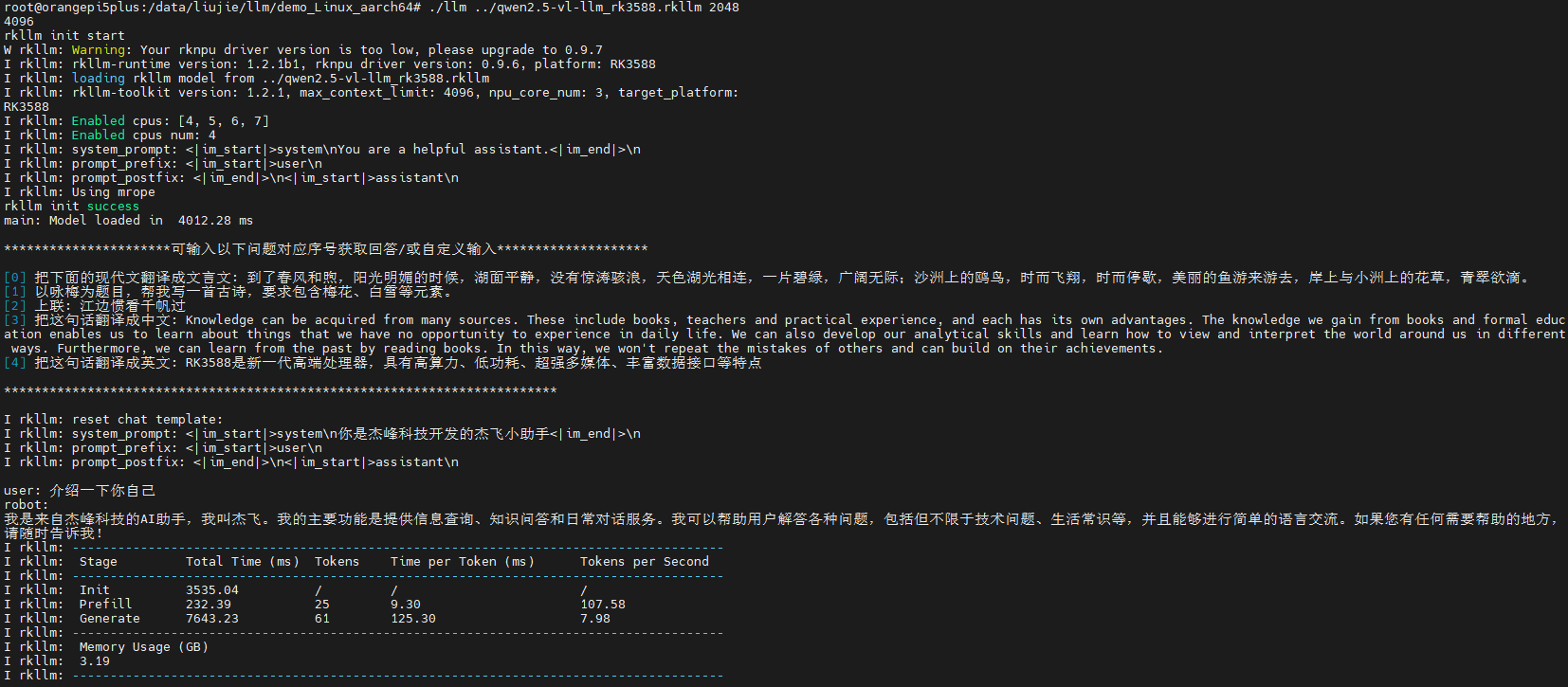
RK3588部署QwenLLM-2.5 3B微调后效果
RK3588转换Qwen3VL模型和官方转换模型效果比较
大模型
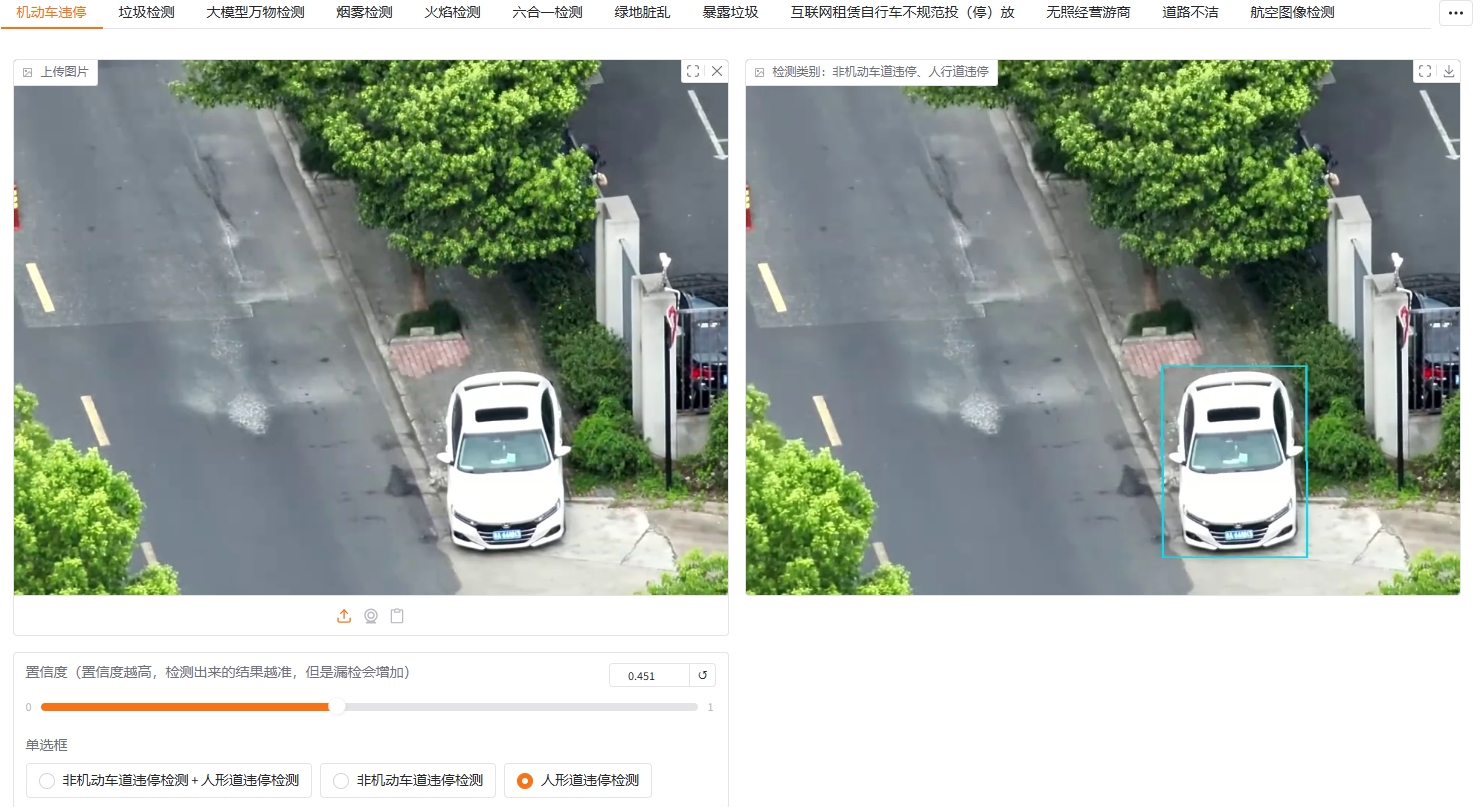
多模态大模型无人机场景机动车人行道违停检测
多模态大模型无人机场景屋顶违建检测
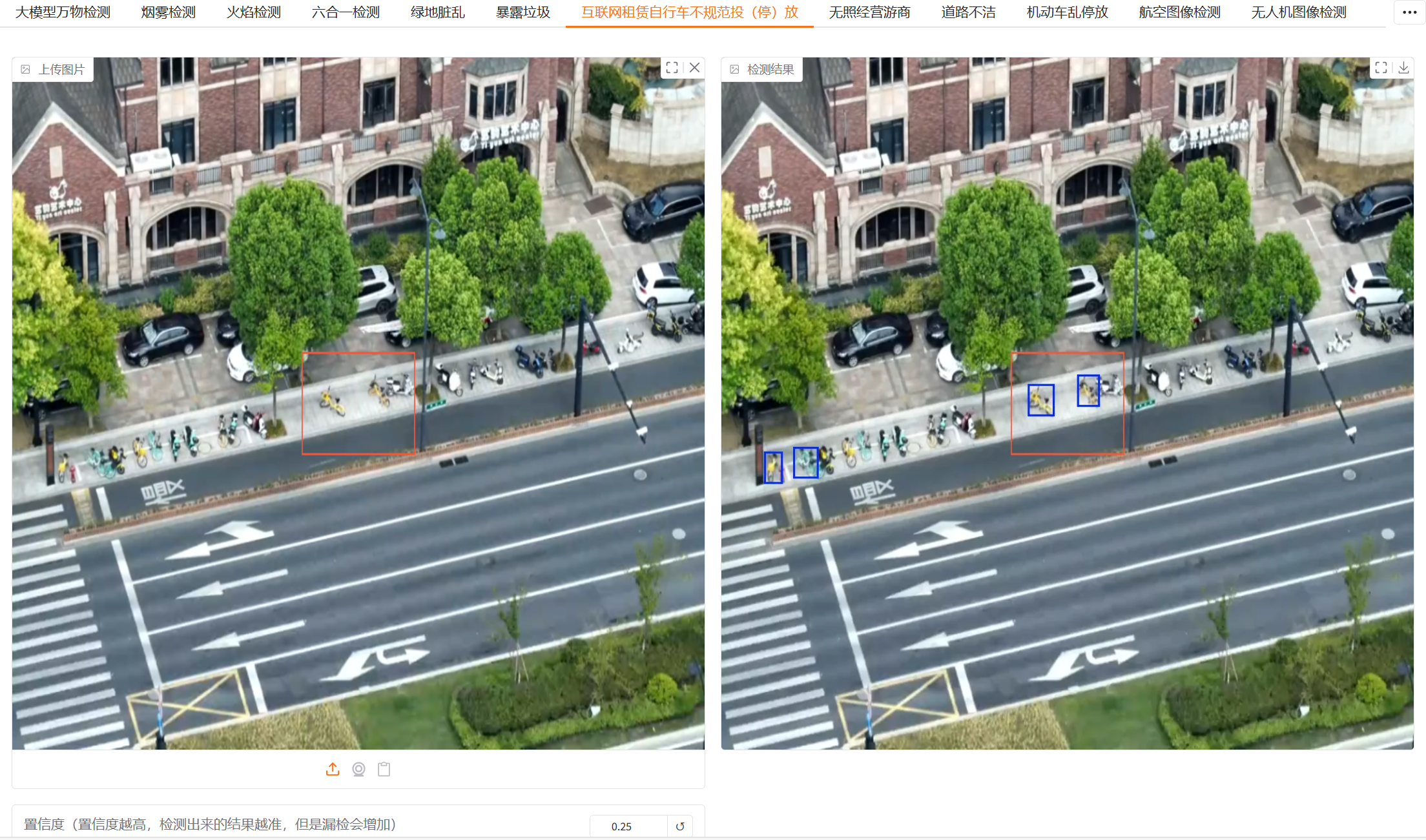
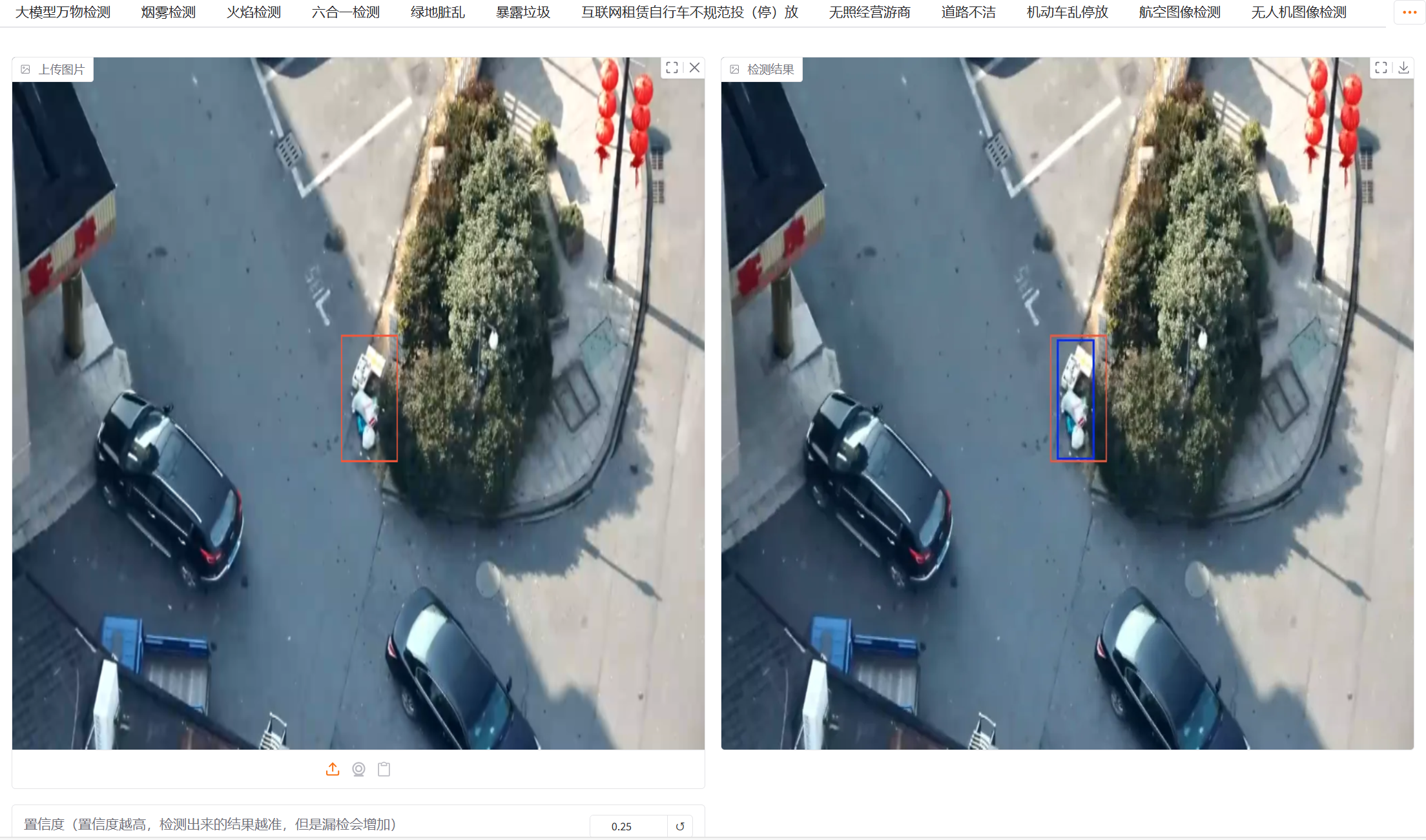
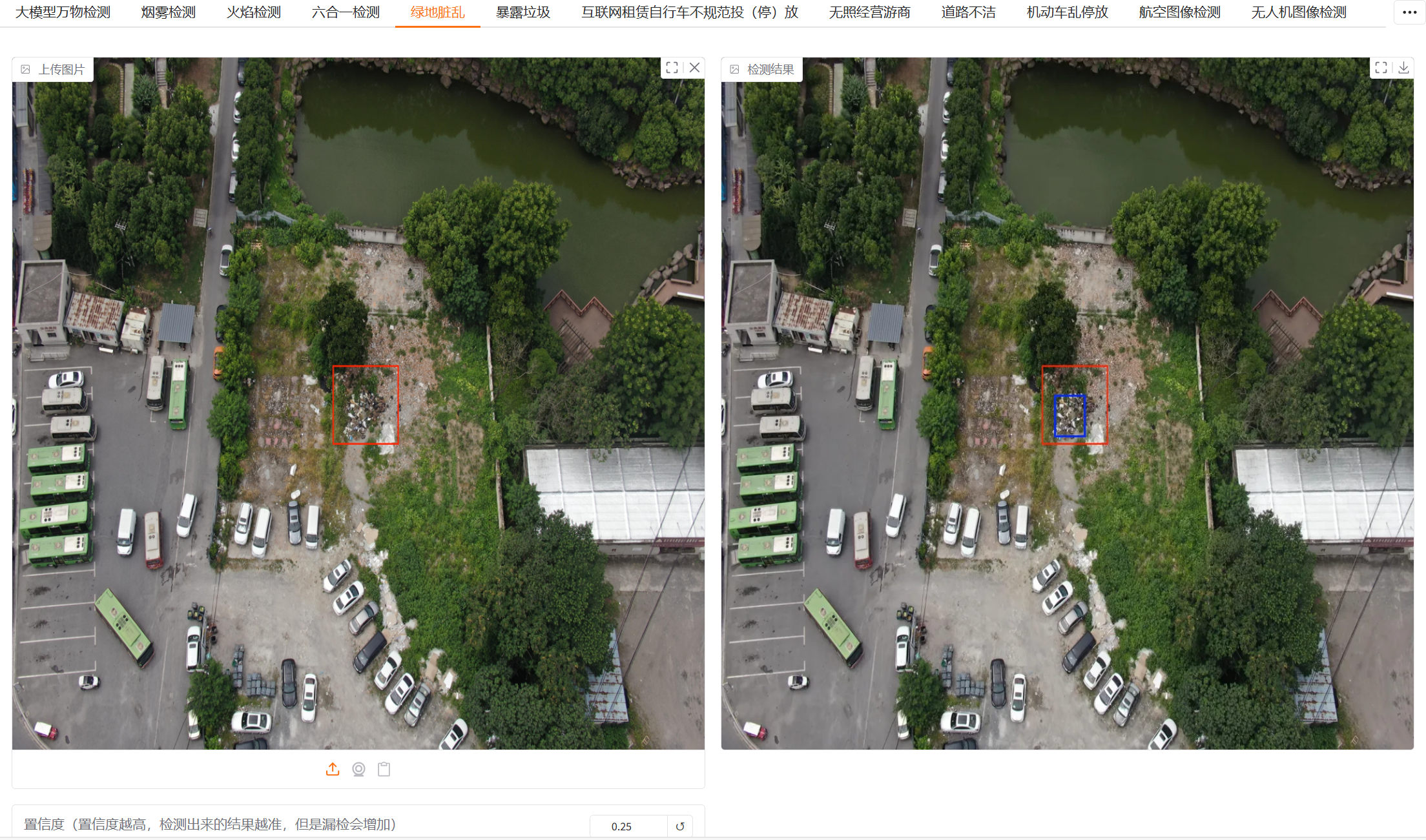
无人机场景算法
共享单车乱停放
堆放生活垃圾
无人机图像目标检测
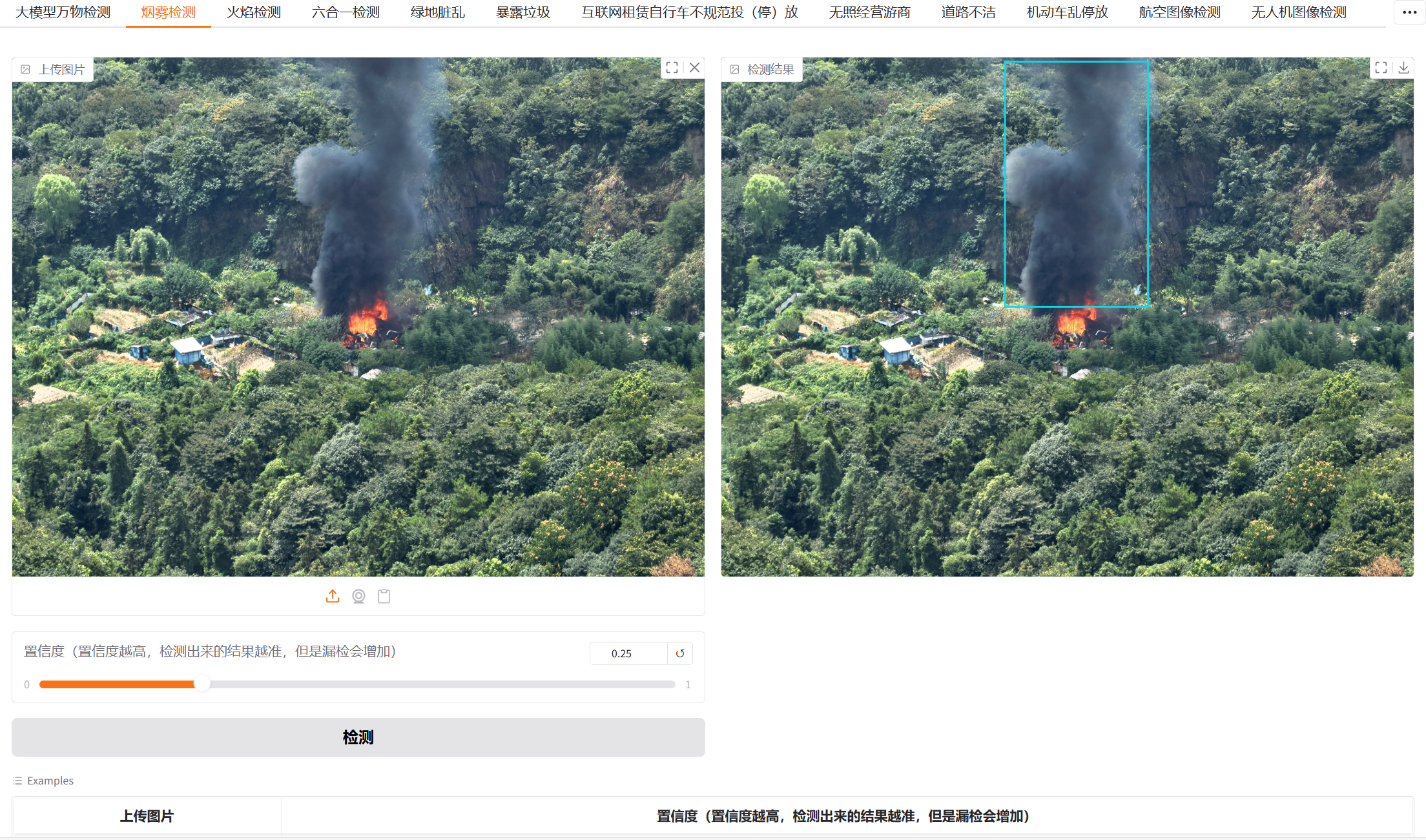
烟雾检测
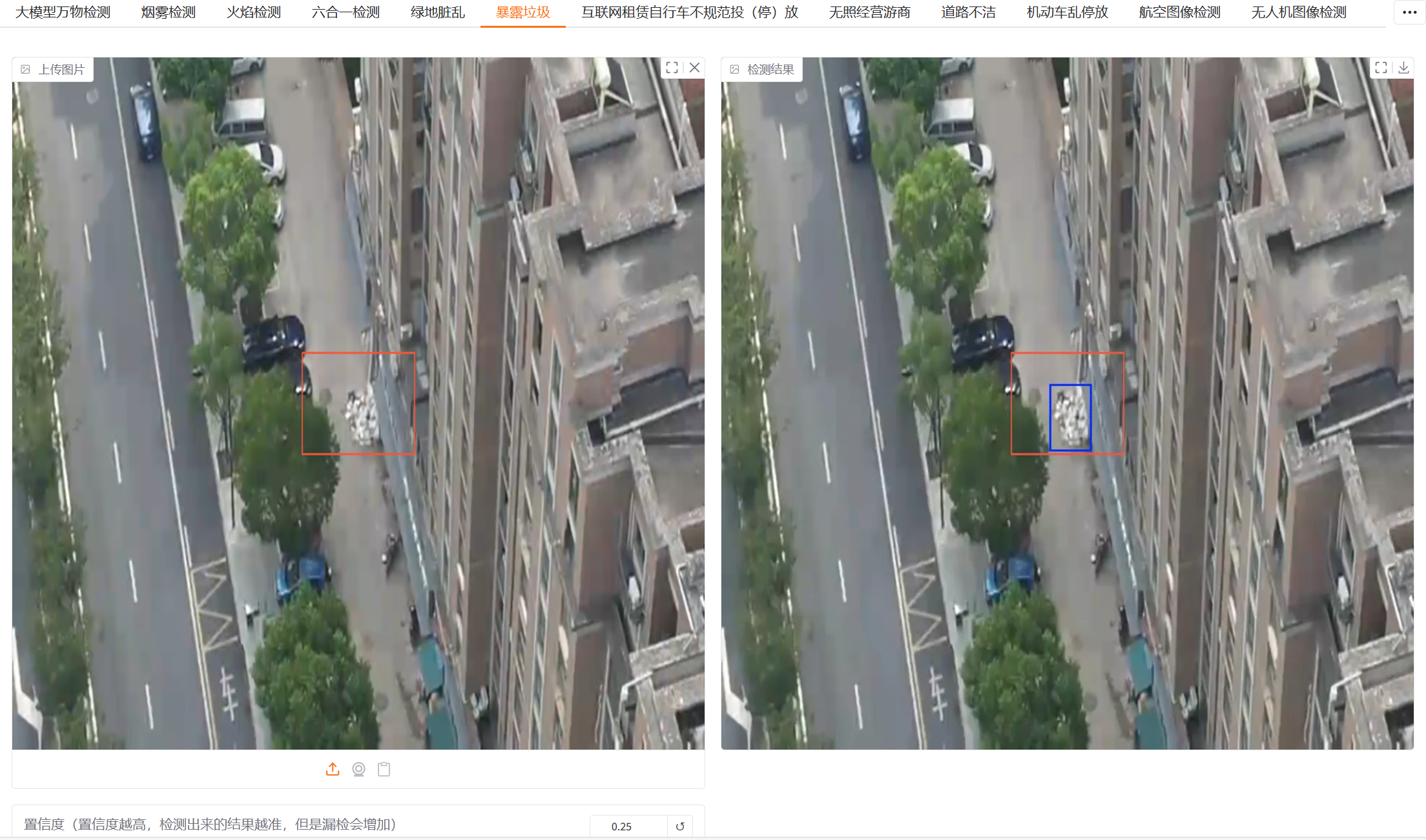
暴露垃圾
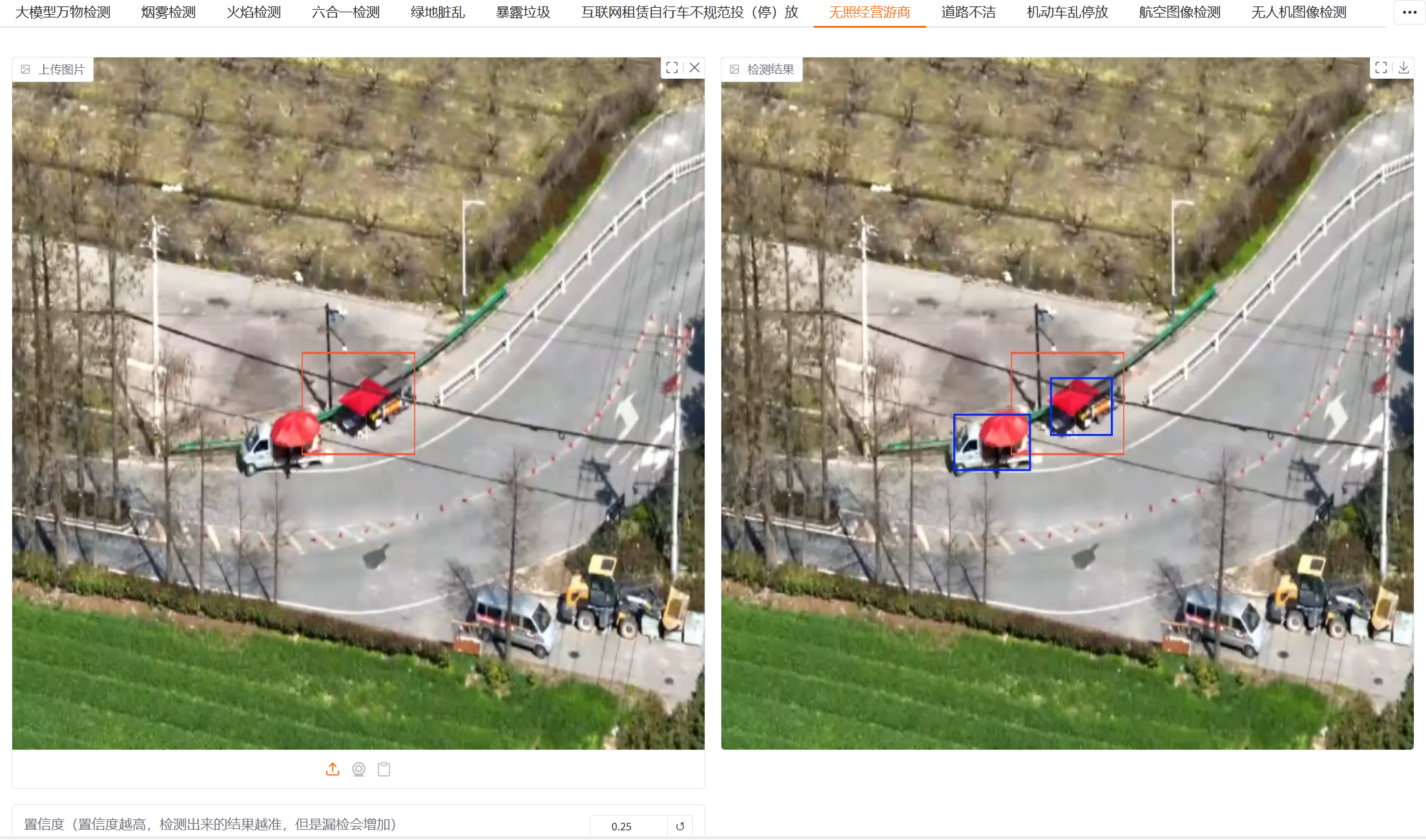
游动商贩
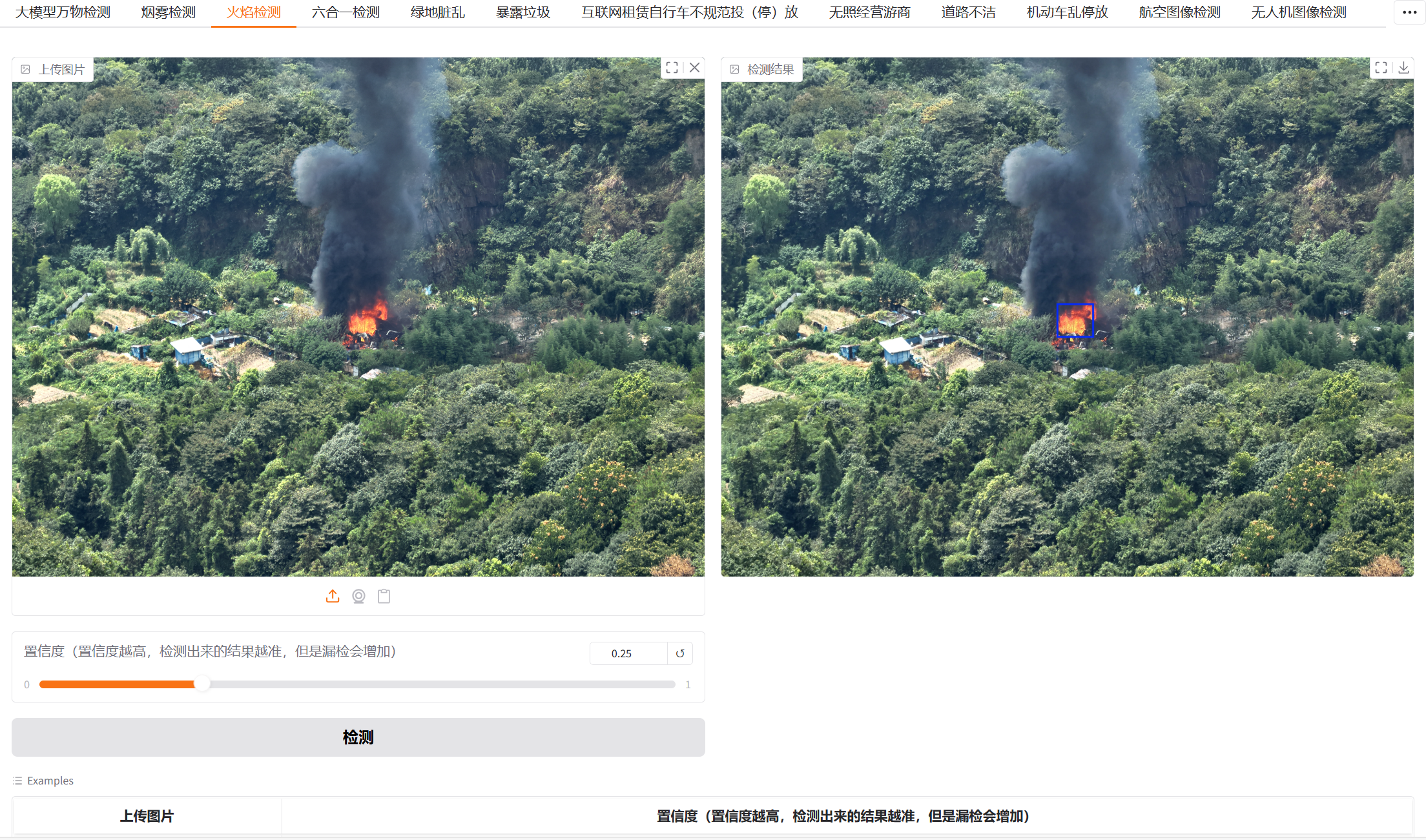
火焰检测
绿地脏乱
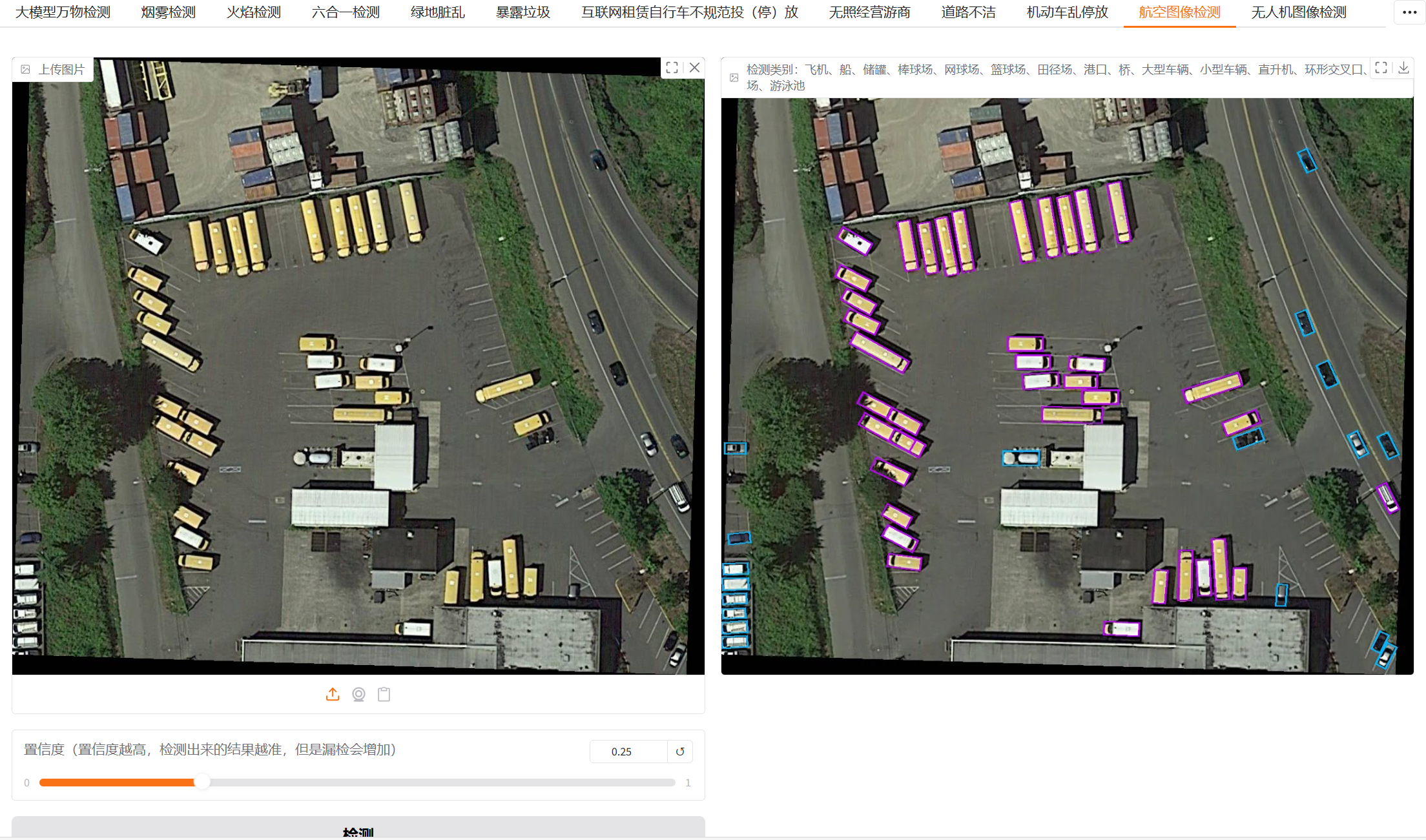
航空图像检测
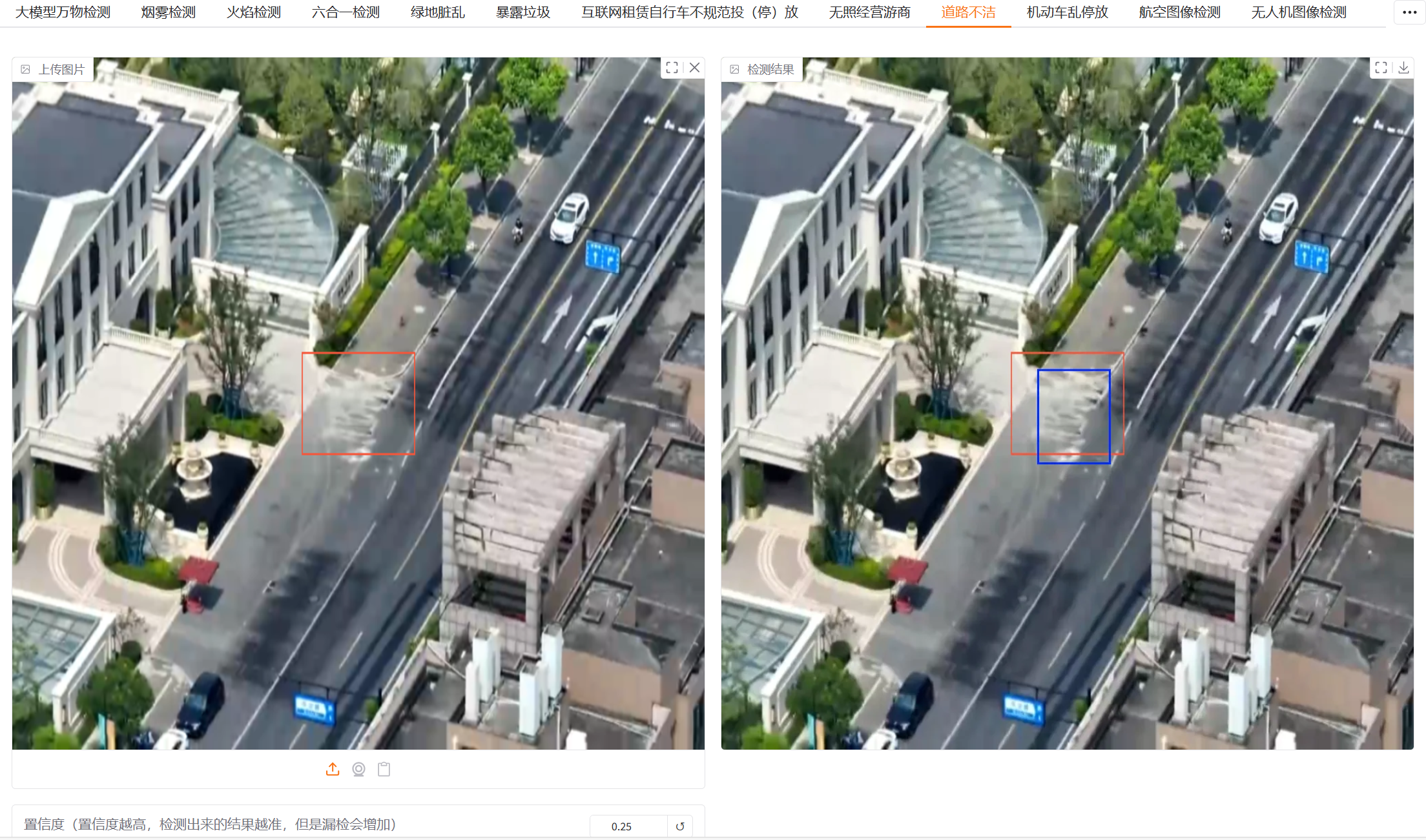
道路不洁
通用目标检测
非机动车道违停
人行道违停
水面漂浮物
消防通道违停
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}